
Selected Research Projects
2022
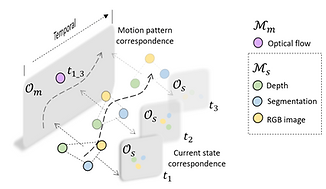
COMPASS: COntrastive Multimodal Pretraining for AutonomouS Systems
COMPASS aims to build general purpose representations for autonomous systems from multimodal observations. Given multimodal signals of spatial and temporal modalities M_s and M_m, respectively. COMPASS learns two factorized latent spaces, i.e., a motion pattern space O_m and a current state space O_s, using multimodal correspondence as the self-supervisory signal.

CausalCity: Complex Simulations with Agency for Causal Discovery and Reasoning
In this paper, we present a high-fidelity simulation environment that is designed for developing algorithms for causal discovery and counterfactual reasoning in the safety-critical context. A core component of our work is to introduce agency, such that it is simple to define and create complex scenarios using high-level definitions. The vehicles then operate with agency to complete these objectives, meaning low-level behaviors need only be controlled if necessary.

Reshaping Robot Trajectories Using Natural Language Commands: A Study of Multi-Modal Data Alignment Using Transformers
In this work, we provide a flexible language based interface for human-robot collaboration, which allows a user to reshape existing trajectories for an autonomous agent. We take advantage of recent advancements in the field of large language models (BERT and CLIP) to encode the user command, and then combine these features with trajectory information using multi-modal attention transformers.

PACT: Perception-Action Causal Transformer for Autoregressive Robotics Pre-Training
Inspired by large pretrained language models, this work introduces a paradigm for pre-training a general purpose representation that can serve as a starting point for multiple tasks on a given robot. We present the Perception-Action Causal Transformer (PACT), a generative transformer-based architecture that aims to build representations directly from robot data in a self-supervised fashion. Through autoregressive prediction of states and actions over time, our model implicitly encodes dynamics and behaviors for a particular robot.

EgoMotion-COMPASS
2nd International Ego4D Workshop @ ECCV 2022
2nd Place: Object State Change Classification
2nd Place: PNR Temporal Localization